В последние 25 лет рендеринг в реальном времени развивался благодаря постоянным улучшениям аппаратного обеспечения. Основная задача всегда заключалась в создании изображения максимальной детализации за 16 миллисекунд. Это стимулировало инновации в графическом оборудовании, конвейерах и системах рендеринга.
Однако замедление закона Мура требует новых вычислительных архитектур, чтобы справляться с растущими требованиями приложений реального времени. Аналогично, когда классические методы графики достигают пределов, нужны свежие подходы для повышения качества изображения и скорости. Возникает ключевая задача: как дальше совершенствовать рендеринг в реальном времени, не полагаясь только на традиционные улучшения железа?
Нейронный шейдинг предлагает свежий путь — внедрение обучаемых моделей прямо в графический конвейер для достижения выдающегося качества и производительности. Эта технология использует специализированное AI-оборудование, например Tensor Cores от NVIDIA, чтобы запускать нейронные сети эффективно в реальном времени.
В этой статье разберем основы и покажем, как войти в эту меняющую всё технологию.
Что такое нейронный шейдинг?
В основе нейронного шейдинга лежит идея сделать часть графического конвейера обучаемой. Это может касаться любых параметров, которые настраиваются с помощью методов машинного обучения, но особенно перспективны компактные нейронные сети, интегрированные в шейдеры и взаимодействующие с остальной системой рендеринга.
Такие сети работают очень быстро в реальном времени, особенно с ускорением от технологий вроде кооперативных векторов. С одной стороны, это выжимает максимум из текущего оборудования, позволяя отображать больше деталей без уменьшения транзисторов. С другой — обучаемые шейдеры решают задачи, сложные для традиционных методов. Это добавляет в арсенал графики рабочий инструмент, доступный уже сейчас.
Как это меняет подход?
Классическая инженерия подразумевает понимание проблемы, ее решение, кодирование и выполнение. Но некоторые задачи не имеют готовых решений, или они слишком затратны для реального времени, особенно в нейронном шейдинге. Здесь на помощь приходит оптимизация. Вместо прямого решения мы берем известные входы и выходы, обучаем математическую модель, подстраивая параметры шаг за шагом, пока не получим полезное приближение.
Современный нейронный шейдинг использует мощные инструменты вроде Slang — языка шейдинга, который становится ключевым в разработке игр. Его поддерживает Khronos, организация, отвечающая за API вроде OpenGL и Vulkan. Slang обеспечивает совместимость с платформами, целевыми для HLSL, SPIR-V, Metal и других. Он включает современные конструкции вроде generics и, что важно для нейронного шейдинга, автоматическое дифференцирование (autodiff), упрощающее сложные вычисления.
SlangPy — это интерфейс Python для Slang. Он дает доступ к базовым элементам графики, таким как буферы вычислений и текстуры. Полностью кросс-платформенный (под D3D 12, Vulkan, CUDA, Metal), SlangPy предлагает функциональный API для прямого вызова шейдеров Slang из Python.
Для практики посмотрите лабораторию по введению в Slang от SIGGRAPH и материалы для скачивания. Также полезна сессия Birds of a Feather по Slang с обсуждениями сообщества.
С чего начать: пример с mipmap
Возьмем конкретный случай, чтобы проиллюстрировать идеи: генерацию mipmap. Обычные mipmap хорошо справляются с цветными текстурами вроде альбедо, которые сглаживаются простыми фильтрами. Но карты геометрии или топологии сжимаются плохо — нельзя просто усреднить пик с впадиной, чтобы получить плоскую поверхность.
Простой подход приводит к артефактам с шумными бликами и выдуманными поверхностями. Эта проблема изучена давно, есть аналитические решения, например метод Toksvig: он фильтрует карты нормалей, корректируя шероховатость по дисперсии нормалей в уровнях mipmap, учитывая геометрическую сложность на разных масштабах.
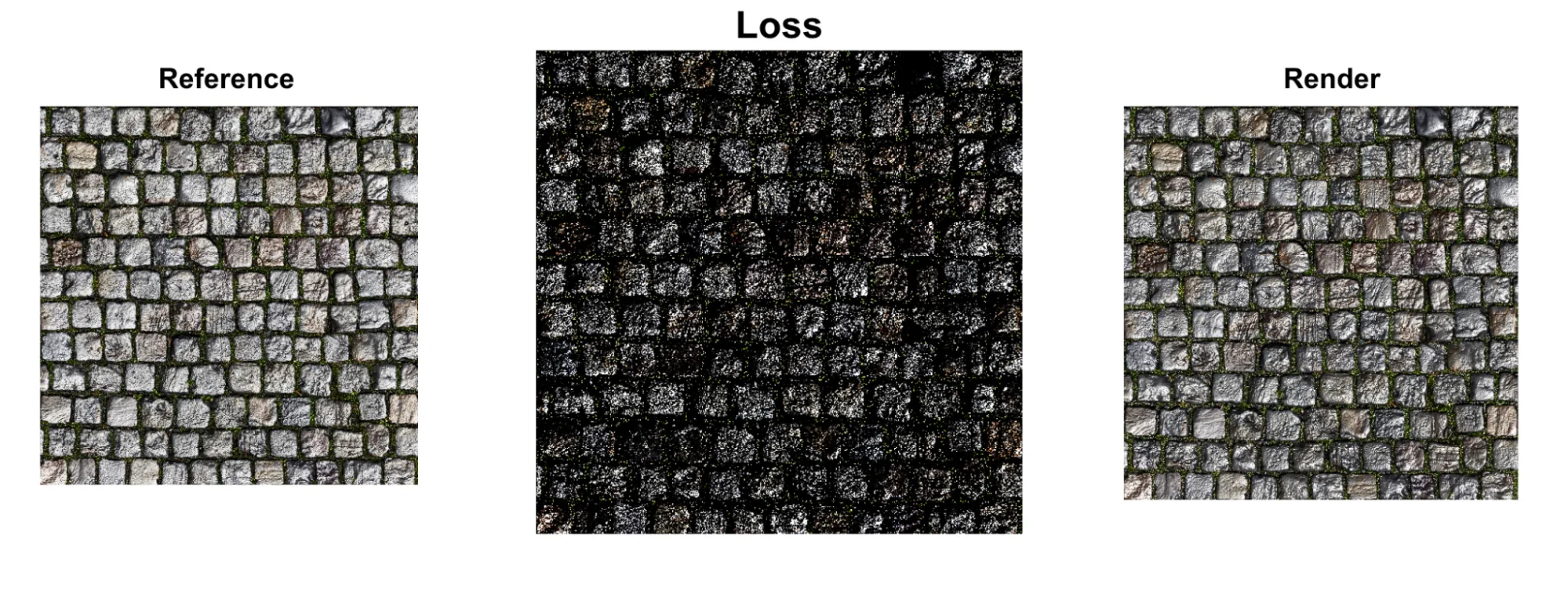
Хотя аналитические методы эффективны для узких случаев, они требуют знаний домена и тонкой настройки. Нейронная оптимизация дает универсальный вариант — генерируем mipmap, минимизируя разницу между сжатым рендерингом и эталонным, обучая оптимальные представления без явных формул.
Как работает оптимизация
Процесс оптимизации делится на два этапа:
- Прямой этап: рендерим идеальный выход традиционно, генерируем результат и измеряем разницу между ними.
- Обратный этап: вычисляем, как скорректировать входы, чтобы уменьшить ошибку, с помощью автоматического дифференцирования.
Суть в том, что возможности autodiff в Slang автоматически генерируют обратные производные для всего рендеринга на этапе компиляции. Это быстрее и удобнее ручного дифференцирования, и производные всегда синхронизированы с изменениями в прямом коде.
Вот простой пример, как разработчик может подойти к этому в Slang. Это иллюстрация, которую нужно адаптировать под случай: добавить данные текстуры и реализацию BRDF.
// Определяем обучаемые параметры mipmap для материала
struct MaterialParameters {
GradOutTensor<float3, 2> albedo;
GradOutTensor<float3, 2> normal;
};
// Дифференцируемая функция рендеринга
[Differentiable]
float3 render(int2 pixel, MaterialParameters material, no_diff float3 light_dir, no_diff float3 view_dir) {
// Яркий белый свет
float light_intensity = 5.0;
// Сэмплируем блестящий BRDF (сегодня шел дождь!)
float3 brdf_sample = sample_brdf(
// предполагаем, что BRDF реализован отдельно
material.get_albedo(pixel), // цвет альбедо
normalize(light_dir), // направление света
normalize(view_dir), // направление взгляда
material.get_normal(pixel), // сэмпл карты нормалей
0.05, // шероховатость
0.0, // металлический (не металл)
1.0 // спекулярный
);
// Комбинируем свет с BRDF для цвета пикселя
return brdf_sample * light_intensity;
}
// Простая функция даунсэмплинга бокс-фильтром
float3 downsample(
int2 pixel,
Tensor<float3, 2> source)
{
float3 res = 0;
res += source.getv(pixel * 2 + int2(0, 0));
res += source.getv(pixel * 2 + int2(1, 0));
res += source.getv(pixel * 2 + int2(0, 1));
res += source.getv(pixel * 2 + int2(1, 1));
return res * 0.25;
}
// Функция потерь, сравнивающая mipmap с эталоном
[Differentiable]
float3 loss(
no_diff int2 pixel,
no_diff float3 reference,
MaterialParameters material,
no_diff float3 light_dir,
no_diff float3 view_dir)
{
float3 color = render(pixel, material, light_dir, view_dir);
float3 error = color - reference;
return error * error; // Квадратичная ошибка
}
А вот как вызвать этот код через Python/SlangPy:
import slangpy as spy
import pathlib
# Создаем устройство и загружаем модуль Slang
device = spy.create_device(
include_paths=[
pathlib.Path(__file__).parent.absolute(),
]
)
module = spy.Module.load_from_file(device, "example.slang")
# Загружаем материалы.
albedo_map = spy.Tensor.load_from_image(device, "PavingStones070_2K.diffuse.jpg", linearize=True)
normal_map = spy.Tensor.load_from_image(device, "PavingStones070_2K.normal.jpg", scale=2, offset=-1)
def downsample(source: spy.Tensor, steps: int) -> spy.Tensor:
for i in range(steps):
dest = spy.Tensor.empty(
device=device,
shape=(source.shape[0] // 2, source.shape[1] // 2),
dtype=source.dtype)
module.downsample(spy.call_id(), source, _result=dest)
source = dest
return source
# Выделяем тензор для выхода + вызываем функцию рендеринга
output = spy.Tensor.empty_like(albedo_map)
module.render(
pixel = spy.call_id(),
material = {
"albedo": albedo_map,
"normal": normal_map,
},
light_dir = spy.math.normalize(spy.float3(0.2, 0.2, 1.0)),
view_dir = spy.float3(0, 0, 1),
_result = output)
# Даунсэмплируем тензор выхода.
output = downsample(output, 2)
# Сохраняем в файл
output_filename = "render_output.png"
output.save_to_image(output_filename)
Пока мы взяли исходную текстуру, сжали ее и сохранили. Теперь нужно вычислить результат из обучаемых параметров и разницу с оригиналом. Цель — обучить меньшие текстуры, чтобы они давали тот же эффект, как полная версия референса. Начнем с расчета потерь:
# Потери между даунсэмплированным выходом полного разрешения (эталон)
# и результатом от входов четвертьного разрешения.
loss_output = spy.Tensor.empty_like(output)
module.loss(
pixel = spy.call_id(),
material = {
"albedo": downsample(albedo_map, 2),
"normal": downsample(normal_map, 2),
},
reference = output,
light_dir = spy.math.normalize(spy.float3(0.2, 0.2, 1.0)),
view_dir = spy.float3(0, 0, 1),
_result = loss_output)
Этот код показывает, насколько результат отличается от желаемого, но не говорит, как подстроить параметры. Для этого нужны градиенты — здесь autodiff Slang поможет. Добавим функцию в Slang:
void calculate_grads(
int2 pixel,
MaterialParameters material,
MaterialParameters ref_material)
{
float3 light_dir = random_direction(); // Предполагаем реализацию генератора случайных направлений
float3 view_dir = random_direction();
// Рендерим высококачественный эталон стандартной функцией
float3 reference = render(pixel, ref_material, light_dir, view_dir);
// Обратное распространение
bwd_diff(loss)(pixel, reference, material, light_dir, view_dir, 1.0);
}
Эта функция использует нашу функцию потерь, чтобы вычислить градиенты для каждого пикселя текстур материала — производную потерь по каждому входу. Градиенты указывают, как обновить текстуры, чтобы уменьшить потери.
Последний шаг — обновить входные текстуры по градиентам и повторить цикл, приближаясь к идеалу. Для примера возьмем простую функцию, но в реальности используют продвинутые оптимизаторы вроде Adam.
void optimizer_step(inout float3 parameter, float3 derivative, float learning_rate) {
parameter -= learning_rate * derivative;
}
Теперь повторяем шаги в простом цикле Python:
for iteration in range(num_iterations):
# Шаг 1: Вычисляем градиенты через автоматическое дифференцирование
module.calculate_grads(
pixel=spy.call_id(),
material=trainable_material,
ref_material=reference_material
)
# Шаг 2: Обновляем параметры оптимизатором
module.optimizer_step(
pixel=spy.call_id(),
trainable_material["albedo"],
learning_rate=learning_rate
)
# Повторяем для карты нормалей...
Обратите внимание: тот же код рендеринга, что вычисляет цвет пикселей, используется для обучения параметров mipmap. Компилятор автоматически генерирует градиенты для всей текстуры, упрощая обучение сложных моделей генерации mipmap.
Хотя это упрощенный пример, подход можно интегрировать в проект реального времени как оффлайн-бейк для лучших mipmap сложных нелинейных карт. Можно даже обучить общую модель на семью материалов и дообучить под актив.
Основы нейронных сетей в шейдерах
Переходя от простой оптимизации параметров, можно встроить целые нейронные сети прямо в шейдеры. Нейронная сеть — это математическая функция, аппроксимирующая сложные связи между входами и выходами. Вместо явного кода для этих связей сеть обучается их извлекать самостоятельно.
Зачем нейронные сети в шейдерах?
Нейронные сети особенно хороши для задач графики:
- Сжатие: Компактная сеть представляет сложные текстуры или материалы с меньшим числом параметров, чем традиционные методы.
- Аппроксимация: Они заменяют дорогие вычисления (сложные модели освещения) быстрыми операциями.
- Генерализация: После обучения сети справляются с вариациями и крайними случаями, трудно программируемыми вручную.
- Оптимизация: Они находят оптимальные решения для задач без аналитических формул или слишком затратных.
Базовые элементы
Основной блок нейронной сети прост: входы (вещественные числа), веса (настраиваемые параметры), смещения (дополнительные настраиваемые) и нелинейная функция активации. Сеть учится, подстраивая веса и смещения, чтобы минимизировать разницу между предсказаниями и желаемыми выходами.
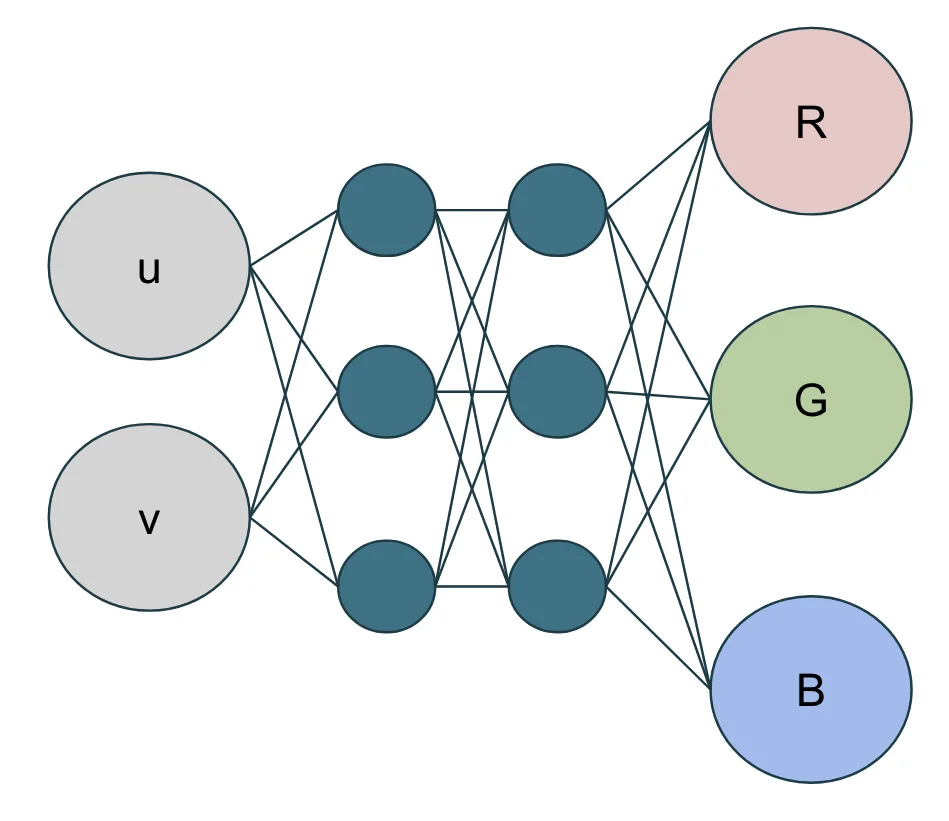
Продолжая с текстурами, создадим сеть, которая принимает UV-координаты и генерирует RGB. С девятью параметрами (шесть весов и три смещения) можно заменить 200 000 чисел традиционной текстуры.
Для этой сети используем гиперболический тангенс (tanh()) как активацию — распространенный выбор. Обучение через шаг оптимизации в фреймворке. Класс NetworkParameters в Python имеет метод optimize(), который вызывает adamOptimize() в модуле Slang. Там реализуется базовый Adam-оптимизатор на GPU.
Вот базовая реализация сети в Slang:
import slangpy;
// Простая функция активации (tanh)
[Differentiable]
float activation(float x) {
return tanh(x);
}
// Простой Adam-оптимизатор для одного параметра
void adamOptimize(
inout float primal, // Параметр для оптимизации
inout float grad, // Градиент
inout float m_prev, // Первое момент (среднее градиента)
inout float v_prev, // Второе момент (среднее квадрата градиента)
float learning_rate, // Скорость обучения
int iteration) // Номер итерации
{
const float ADAM_BETA_1 = 0.9;
const float ADAM_BETA_2 = 0.999;
const float ADAM_EPSILON = 1e-8;
// Обновляем моменты
float m = ADAM_BETA_1 * m_prev + (1.0 - ADAM_BETA_1) * grad;
float v = ADAM_BETA_2 * v_prev + (1.0 - ADAM_BETA_2) * (grad * grad);
m_prev = m;
v_prev = v;
// Коррекция смещения
float mHat = m / (1.0f - pow(ADAM_BETA_1, iteration));
float vHat = v / (1.0f - pow(ADAM_BETA_2, iteration));
// Обновляем параметр
primal -= learning_rate * (mHat / (sqrt(vHat) + ADAM_EPSILON));
// Сбрасываем градиент
grad = 0;
}
// Параметры сети с поддержкой автоматического дифференцирования
struct NetworkParameters<int Inputs, int Outputs> {
RWTensor<float, 1> biases;
RWTensor<float, 2> weights;
AtomicTensor<float, 1> biases_grad;
AtomicTensor<float, 2> weights_grad;
[Differentiable]
float get_bias(int neuron) {
return biases.get({neuron});
}
[Differentiable]
А вот настройка и обучение сети в Python:
import slangpy as spy
import numpy as np
import pathlib
# Создаем устройство и загружаем модуль Slang
device = spy.create_device(
include_paths=[
pathlib.Path(__file__).parent.absolute(),
]
)
module = spy.Module.load_from_file(device, "example.slang")
# Обертка Python для структуры NetworkParameters Slang
class NetworkParameters(spy.InstanceList):
def __init__(self, inputs: int, outputs: int):
super().__init__(module[f"NetworkParameters<{inputs},{outputs}>"])
self.inputs = inputs
self.outputs = outputs
# Смещения и веса для слоя.
self.biases = spy.Tensor.from_numpy(device, np.zeros(outputs).astype('float32'))
self.weights = spy.Tensor.from_numpy(device, np.random.uniform(-0.5, 0.5, (outputs, inputs)).astype('float32'))
# Градиенты для смещений и весов.
self.biases_grad = spy.Tensor.zeros_like(self.biases)
self.weights_grad = spy.Tensor.zeros_like(self.weights)
# Временные данные для Adam-оптимизатора.
self.m_biases = spy.Tensor.zeros_like(self.biases)
self.m_weights = spy.Tensor.zeros_like(self.weights)
self.v_biases = spy.Tensor.zeros_like(self.biases)
self.v_weights = spy.Tensor.zeros_like(self.weights)
# Вызывает функцию 'optimize' Slang для смещений и весов
def optimize(self, learning_rate: float, optimize_counter: int):
module.adamOptimize(self.biases, self.biases_grad, self.m_biases, self.v_biases, learning_rate, optimize_counter)
module.adamOptimize(self.weights, self.weights_grad, self.m_weights, self.v_weights, learning_rate, optimize_counter)
# Создаем параметры сети для слоя с 2 входами и 3 выходами
params = NetworkParameters(2, 3)
print(f"Created NetworkParameters with {params.inputs} inputs and {params.outputs} outputs")
print(f"Biases shape: {params.biases.shape}")
print(f"Weights shape: {params.weights.shape}")
print(f"Initial weights:\n{params.weights.to_numpy()}")
Для сложных сетей легко добавить слои:
// Многослойная сеть для сложной генерации текстур
struct Network {
NetworkParameters<2, 32> layer0;
NetworkParameters<32, 32> layer1;
NetworkParameters<32, 3> layer2;
[Differentiable]
float3 eval(no_diff float2 uv) {
float inputs[2] = {uv.x, uv.y};
float output0[32] = layer0.forward(inputs);
[ForceUnroll]
for (int i = 0; i < 32; ++i)
output0[i] = activation(output0[i]);
float output1[32] = layer1.forward(output0);
[ForceUnroll]
for (int i = 0; i < 32; ++i)
output1[i] = activation(output1[i]);
float output2[3] = layer2.forward(output1);
[ForceUnroll]
for (int i = 0; i < 3; ++i)
output2[i] = activation(output2[i]);
return float3(output2[0], output2[1], output2[2]);
}
}
Преимущество в том, что инфраструктура autodiff, работавшая для простой оптимизации, подходит и для обучения сетей. Компилятор генерирует градиенты для всей сети, облегчая обучение моделей генерации текстур.
Ключевые приемы для лучших результатов
Компактные сети требуют тщательной настройки. Лучшие методы зависят от задачи — то, что подходит для текстур, может не сработать для материалов или освещения. Вот приемы, улучшающие результаты для примера с текстурами:
- Функции активации: ReLU — популярная в машинном обучении, пропускает положительные входы и обнуляет отрицательные. Она эффективна и быстра для многих задач нейронного шейдинга, но создает кусочно-линейные выходы из-за порога в ноль, что приводит к треугольным паттернам в 2D-текстурах. Гладкие активации вроде экспоненты дают лучший визуал для генерации текстур. Выбор зависит от случая.
// Альтернативные функции активации
[Differentiable]
float3 smoothActivation(float3 x) {
return exp(x); // Экспоненциальная для гладкого выхода
}
[Differentiable]
float3 leakyReLU(float3 x) {
return max(0.1 * x, x); // Leaky ReLU предотвращает мертвые нейроны
}
- Leaky ReLU: Когда ReLU обнуляет отрицательный вход, градиент тоже становится нулевым. При обратном распространении обновления не доходят до весов этого нейрона. Если нейрон часто получает отрицательные входы, он 'умирает' — всегда выдает ноль и не учится. В малых сетях потеря даже нескольких нейронов критична. Leaky ReLU выдает малое отрицательное значение (обычно 0.01 от входа), градиент не нулевой, нейрон остается активным.
- Кодирование частот: Вместо прямой подачи UV-координат на сеть, сначала пропустите их через синусы и косинусы разных частот. Это повышает качество без роста вычислений. Сети плохо учат высокочастотные паттерны (детали, резкие переходы) из низкоразмерных входов. Кодируя как [sin(2πu), cos(2πu), sin(2πv), cos(2πv)], даем компоненты частот. Сеть лучше захватывает гладкие и детальные паттерны, полезно для пространственных входов вроде UV. Для не-пространственных — менее актуально.
// Кодирование частот для лучшего представления нейронных текстур
float4 encodeUV(float2 uv) {
float4 encoded;
encoded.x = sin(uv.x * 2.0 * 3.14159);
encoded.y = cos(uv.x * 2.0 * 3.14159);
encoded.z = sin(uv.y * 2.0 * 3.14159);
encoded.w = cos(uv.y * 2.0 * 3.14159);
return encoded;
}
// Улучшенная сеть с кодированием частот
[Differentiable]
float3 evaluateNetworkWithEncoding(NeuralNetwork net, float2 uv) {
float4 encoded = encodeUV(uv); // Теперь 4D-вход вместо 2D
float3 output = float3(0.0, 0.0, 0.0);
for (int i = 0; i < 3; i++) {
output[i] = net.biases[i];
for (int j = 0; j < 4; j++) {
output[i] += net.weights[i * 4 + j] * encoded[j];
}
}
return smoothActivation(output);
}
Как аппаратное обеспечение ускоряет кооперативные векторы
Современные GPU имеют Tensor Cores для эффективных матричных умножений. Но для Tensor Cores нужна кооперативная работа потоков.
Кооперативные векторы упрощают доступ к этому. Позволяют писать код как обычное умножение матрицы на вектор, компилятор сам мапит на Tensor Cores без упаковки или унифицированного потока.
Вот использование кооперативных векторов для ускорения сетей:
struct FeedForwardLayer<int InputSize, int OutputSize> {
ByteAddressBuffer weights;
uint weightsOffset;
ByteAddressBuffer biases;
uint biasesOffset;
CoopVec<float, OutputSize> eval(CoopVec<float, InputSize> input) {
let output = coopVecMatMulAdd<float, OutputSize>(
input,
CoopVecComponentType.Float32, // формат входа
weights, weightsOffset,
CoopVecComponentType.Float32, // формат весов
biases, biasesOffset,
CoopVecComponentType.Float32, // формат смещений
CoopVecMatrixLayout.ColumnMajor, // layout матрицы
false, // транспонирована ли матрица
sizeof(float) * InputSize); // шаг матрицы
return max(CoopVec<float, OutputSize>(0.0f), output); // ReLU
}
}
Применения в реальности: что можно создать?
Описанные техники — база для множества применений нейронного шейдинга. Вот перспективные направления:
Нейронное сжатие текстур (NTC)
Нейронное сжатие текстур — одно из самых практичных применений. Традиционные форматы вроде BC1 и BC7 имеют пределы, но NTC дает выше качество при той же компрессии или лучше сжатие при равном качестве.
Идея — маленькая сеть как декодер, на вход низкоточностные латентные текстуры и позиционное кодирование. Преимущества:
- Переменный битрейт: Разное число латентных текстур с низкой разрядностью дает диапазон от 0.5 до 20 бит на пиксель.
- Независимый декодинг: Каждый пиксель декодируется отдельно, подходит для сэмплинга в шейдерах.
- Без галлюцинаций: Малые сети, обученные с нуля на текстуру, не генерируют артефакты вроде лишних деталей.
Детали и примеры в библиотеке NVIDIA для нейронного сжатия текстур.
Нейронные материалы
Нейронные материалы — мощное применение: учим сложные слоистые материалы и дистиллируем в компактные сети, быстрее оригинального шейдера.
Сеть принимает направление света, взгляда и латентные коды, выдает цвет материала. Для пространственной вариации — текстура латентных кодов как допвход.
Ключ — энкодер во время обучения переводит оригинальные текстуры в латентные, затем бейк для runtime. Масштабируется до 4K+ без проблем с оптимизацией по пикселям.
За пределами текстур и материалов
Принципы нейронного шейдинга применимы шире. Можно использовать для:
- Расчетов освещения: Аппроксимация сложных моделей быстрыми нейронными.
- Постобработки: Оптимальный тон-маппинг, цветокоррекция или стилизация.
- Обработки геометрии: Процедурная генерация или модификация геометрии.
- Анимации: Плавные интерполяции или процедурные движения.
- Процедурной генерации: Алгоритмическое создание контента с изученными паттернами.
- Деноизинга для рейтрейсинга: Снижение шума в рейтрейс-изображениях.
- Сжатия анимации: Эффективное сжатие данных анимации.
- Упрощения мешей: Упрощение 3D-мешей с сохранением вида.
Суть — находить дорогие вычисления или сложные связи, где нейронная аппроксимация поможет.
Будущее: почему нейронный шейдинг важен
Нейронный шейдинг — не просто техника, а смена парадигмы в графике реального времени. Обучаемые шейдеры открывают новые горизонты:
- Баланс качества и производительности: Сети настраиваются плавно под уровни качества, для естественных LOD.
- Расширяемость: Легко добавлять компоненты для сэмплинга или фильтрации.
- Гибкость платформ: Одни нейронные ассеты работают на разном железе — инференс на мощном, транскодинг на слабом.
Успех требует инструментария оптимизаций и отладки для нейронного шейдинга. Как с любой новинкой, есть кривая обучения, но отдача велика.
Первые шаги: что делать дальше
Экосистема нейронного шейдинга развивается быстро. Вот ключевые инструменты:
- Slang: Основной язык шейдинга с autodiff.
- SlangPy: Интерфейс Python для прототипов.
- SDK RTX Neural Shaders: Библиотека для инференса и обучения сетей.
- Примеры кооперативных векторов: Полные примеры ускорения.
Для быстрого старта с Slang и autodiff попробуйте в браузере Slang Playground. Для ресурсов — NVIDIA RTX Kit с поддержкой нейронного шейдинга. Глубже в концепции — курс NVIDIA по нейронному шейдингу на SIGGRAPH.
Технология готова для производства. Для сжатия текстур, материалов или новых идей нейронный шейдинг — мощный инструмент для качества и скорости в графике реального времени.